2025年中國礦用機器人行業技術現狀 未來將突破關鍵技術瓶頸,以提升礦山安全水平和功效【組圖】
行業主要上市公司:中信重工(601608);鐵建重工(688425);科達自控(831832);山河智能(002097);天瑪智控(688570);科達自控(831832);電光科技(002730);北方股份(600262);鄭煤機(601717)等
本文核心數據:技術現狀;重點技術;開發流程;導航技術;路徑規劃技術;多傳感技術;
礦用機器人行業技術發展現狀
——礦用機器人主要技術困境
從目前國內礦山智能機器人的定位來看,礦用機器人的使用是在固定崗位和智能巡檢、開采、運輸、救援等環節釋放大量勞動力,以期實現提高礦山安全水平和工效。而在實現礦山智能化和礦山智能機器人化的過程中,應用場景不明確是制約礦用機器人發展的主要因素,需要持續擴展礦用機器人場景應用。現有礦山智能機器人產品尚不能完全滿足用戶智能化需求,主要表現在人機交互功能、智能感知、智能決策等關鍵核心技術是礦山智能機器人發展的主要瓶頸,同時核心算法和專利等基礎性知識產權研發投入依然不足,制約礦山智能機器人產業可持續發展。

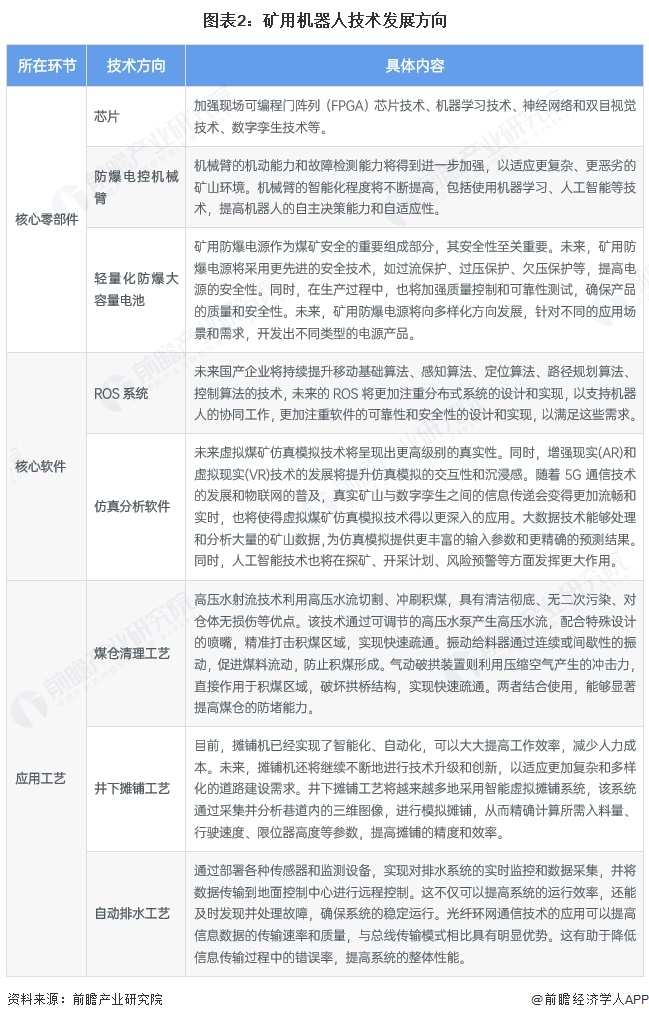
——礦用機器人重點技術方向
未來,芯片技術發展方向將加強現場可編程門陣列(FPGA)芯片技術、機器學習技術、神經網絡和雙目視覺技術、數字孿生技術等。防爆電控機械臂的機動和故障檢測能力將進一步提升;輕量化防爆大容量電池將加強質量控制和可靠性測試,并針對惡劣環境開發出更多種類的產品;ROS系統更加注重分布式設計以支持礦用機器人的協同工作。其他技術發展方向如下:
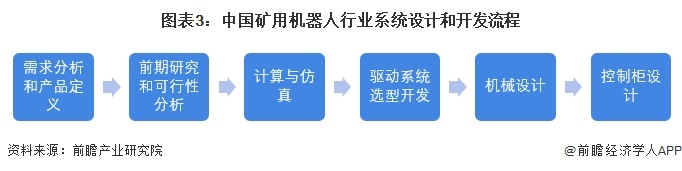
——礦用機器人設計開發流程
礦用機器人研發流程一般從需求分析和產品定義到控制柜設計共分為六步,完成后進行樣品試產并找出問題改進,最后確認樣品無誤后制作出可執行的生產工藝和品質要求文件,再交由采購中心采購原材料,再由生產部門進行批量生產成品。
礦用機器人關鍵技術分析
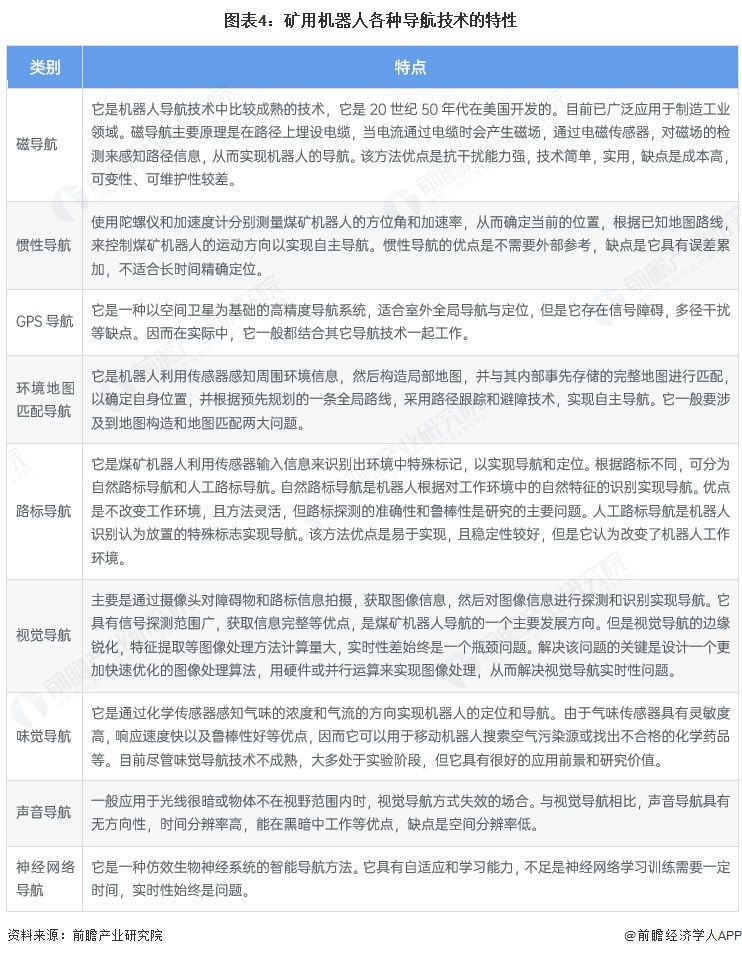
——導航技術
導航技術是煤礦機器人的一項核心技術之一。它是指移動的機器人通過傳感器感知環境信息和自身狀態,實現在有障礙的環境中面向目標的自主運動。目前,煤礦機器人主要的導航方式包括:磁導航、慣性導航、GPS導航、環境地圖模型匹配導航,路標導航、視覺導航、味道導航、聲音導航、神經網絡導航等。
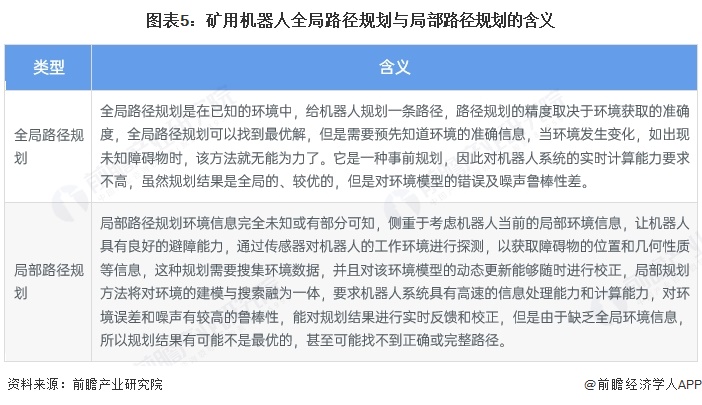
——路徑規劃技術
路徑規劃是按照某一性能指標搜索一條從起點到目標點的最優或次最優的無碰路徑。機器人路徑規劃的研究始于20世紀70年代,目前國內外對這一問題的研究仍然十分活躍。根據環境信息掌握程度,路徑規劃可分為:環境信息完全已知的全局路徑規劃;環境信息不完全或未知的基于傳感器的局部路徑規劃。
——多傳感器融合技術
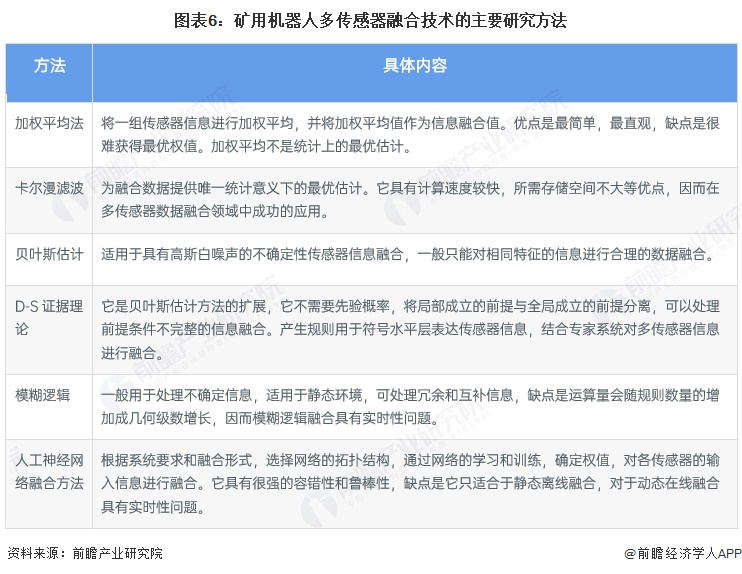
多傳感器信息融合技術是煤礦機器人的關鍵技術之一,它的研究始于20世紀80年代。信息融合是指將多個傳感器所提供的環境信息進行集成處理,形成對外部環境的統一表示。它融合了信息的互補性,信息的冗余性,信息的實時性和信息的低成本性。因而能比較完整地,精確地反映環境特征,從而做出正確的判斷和決策,保證了機器人系統快速性,準確性和穩定性。
目前煤礦機器人的多傳感器融合技術的研究方法主要有:加權平均法,卡爾漫濾波,貝葉斯估計,D-S證據理論推理,產生規則,模糊邏輯,人工神經網絡等。在實際應用中應根據實際情況選擇合適的融合方法,這樣才能體現多傳感器信息融合方法的優越性。
更多本行業研究分析詳見前瞻產業研究院《全球及中國礦用機器人行業發展前景展望與投資戰略規劃分析報告》
同時前瞻產業研究院還提供產業新賽道研究、投資可行性研究、產業規劃、園區規劃、產業招商、產業圖譜、產業大數據、智慧招商系統、行業地位證明、IPO咨詢/募投可研、專精特新小巨人申報、十五五規劃等解決方案。如需轉載引用本篇文章內容,請注明資料來源(前瞻產業研究院)。
更多深度行業分析盡在【前瞻經濟學人APP】,還可以與500+經濟學家/資深行業研究員交流互動。更多企業數據、企業資訊、企業發展情況盡在【企查貓APP】,性價比最高功能最全的企業查詢平臺。
前瞻產業研究院 - 深度報告 REPORTS

本報告前瞻性、適時性地對礦用機器人行業的發展背景、供需情況、市場規模、競爭格局等行業現狀進行分析,并結合多年來礦用機器人行業發展軌跡及實踐經驗,對礦用機器人行...
如在招股說明書、公司年度報告中引用本篇文章數據,請聯系前瞻產業研究院,聯系電話:400-068-7188。


前瞻經濟學人
專注于中國各行業市場分析、未來發展趨勢等。掃一掃立即關注。
前瞻產業研究院
中國產業咨詢領導者,專業提供產業規劃、產業申報、產業升級轉型、產業園區規劃、可行性報告等領域解決方案,掃一掃關注。相關閱讀RELEVANT